3.1.5. PK (Picking), PS (Palletize Shift), PU (Picking-Up) Function
3.1.5. PK (Picking), PS (Palletize Shift), PU (Picking-Up) Function
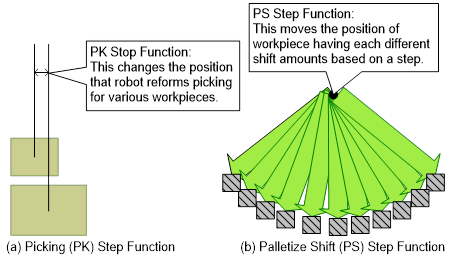
Figure 3.4 Function of Picking (PK) Step & Palletize Shift (PS) Step
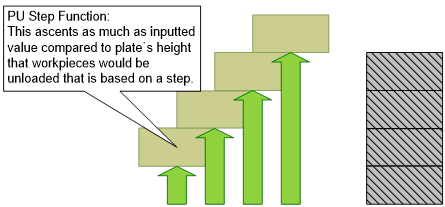
Figure 3.5 Function of Picking-Up (PU) Step

l PK, PU, PS assign the function to perform Palletizing and proper step condition should be used by user’s decision. There are two ways to set up PK, PU, PS.
① Setting Method using user key (f1, f2, f3, f4) (See『Hi5 Controller Operation Manual』)
② After finishing Step Teaching, you can set it up as command adjustment.
※ Attention
l While teaching a robot, not only the first teaching step, but it is also fully considered that step position to be shifted can be existed in motion range of robot. If not, error messages appears as below, 『Arm angle is too small(big)』, 『It exceeds soft limit.』. In this case, you can solve it through adjusting teaching step.