2.1. Installation of Hardware Environment
2.1. Installation of Hardware Environment
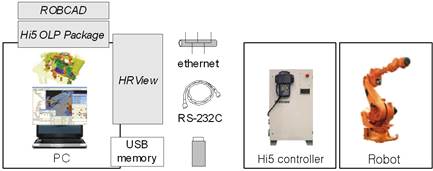
Figure 2.1 Hardware configurations for using the Hi5 OLP package
[Figure 2.1] shows the hardware configurations used for robot teaching with the Hi5 OLP package.
A work program file that is created through a simulation in the desktop PC or notebook PC with ROBCAD installed must be transferred to the Hi5 controller. The work program file can be transferred to the Hi5 controller using USB memory, RS-232C, or Ethernet.