8.3. Collision Detection
8.3. Collision Detection
This is a function that checks whether there’re any collisions among robots, tools, works, and JIG. First you should create a collision detection model in workspace. The position in a hierarchical structure doesn’t matter.
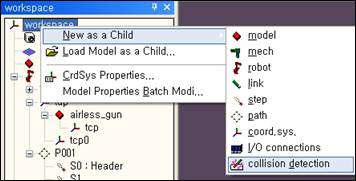
Open popup menu of a collision detection model and select Collision Detection Properties.

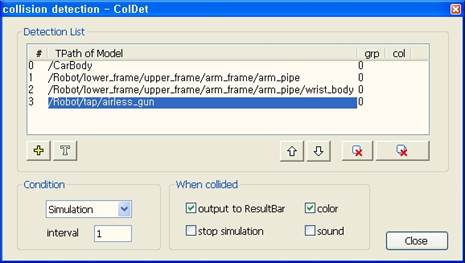
Add rows to Detection List by using  button, press
button, press  button, click nodes in tree window, and enter T path of a model that you want to check.
button, click nodes in tree window, and enter T path of a model that you want to check.
Use  buttons to adjust the order of items.
buttons to adjust the order of items.
 buttons are to delete selected items and delete all the items, respectively.
buttons are to delete selected items and delete all the items, respectively.
Collision detection lowers the simulation speed so it’s good to enter models only that are needed.
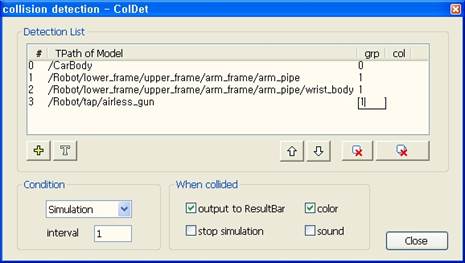
In a model that is entered, there may be sets that don’t need collision detection. In the picture as below, collision detection is not required among airless_gun (the tool mounted on the robot), arm_pipe (i.e. a robot’s upper arm), and wrist_body (i.e. wrist). (They should not be checked because they are always stuck together.) If we assign same group number to this model, collision detection won’t be done for this model. Use any number bigger than or equal to 0 for the group number.
The total number of items should not be more than 100 and there’re no limitation in the total number of groups.
Select when you want to detect collisions in Condition.
| OFF | Do not detect collisions. |
Simulation | Detect collisions only when Step GO or playback simulation. | |
Always | Always detect collisions such as when do JOG or layout models. | |
| Determine how often detect collisions. Detection requires lots of time and makes the simulation very slow or even makes it difficult to run the simulation when the scale of CAD model is large or there’re many items to be detected. In this case, it gets faster if you increase a detection interval. However this may cause inaccurate results because detection is not done every time unit. | |


Options as below are how to indicate collisions when they happen.

output to ResultBar | It reports T path of models whose collisions are detected in Result window.
|
stop simulation | If checked, simulation is stopped when collision happens. If not checked, simulation keeps going even though there’re collisions. |
color | It displays models whose collisions are detected in red. |
sound | Sound effect is generated when collision happens. |


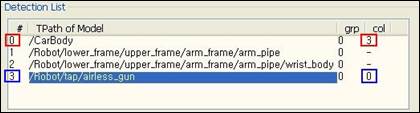
If there’re collisions, the collision status by model is displayed in the col of Detection List. A number other than ‘-‘ in ‘col’ represents there’re collisions with the model in that row number. In the picture above shows a model in row 0 collides with a model in row 3.
Note | Collision detection lowers the speed of simulation or the operation because it does lots of calculations. Deleting parts (holes in bolts and internal structures) that are not needed for simulation in CAD data helps to improve the operation. Import huge CAD files after simplifying it if possible. Increase the detection interval properly if the operation of collision detection is too slow. |