8.2. I/O signal
8.2. I/O signal
In HR-BASIC, there are commands to output or wait digital / analog signal. The operation of this command can be simulated.
Let’s assume the following for each of the robots for the 2 robots.
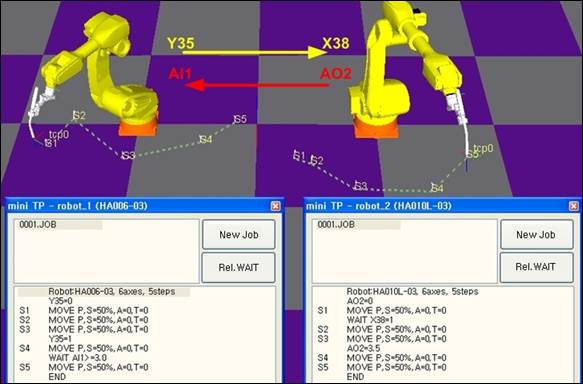
n Robot1 outputs the DO25 signal in 1 when it reaches step 3.
n DO25 signal of robot1 is connected to the DI32 signal of robot2.
n Robot2 wait for the DI32 signal to change to 1 in step 1.
n Robot2 outputs A02 signal in 3.5 when it reaches step 3
n AO2 signal of robot2 is connected to AI1 signal of robot2.
n Robot1 wait for the AI1 signal to be 3.0 or above in step 4.
The taught results are as follows. (The arrows indicating signal connections are drawn to help your understanding.)
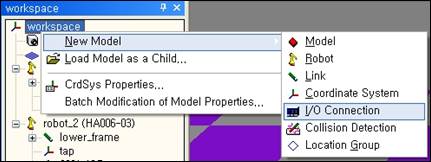
To connect the 2 signals, you need to create an I/O connection model for the workspace model as shown below.
When a new I/O connection model is created, the I/O connection properties window appears.

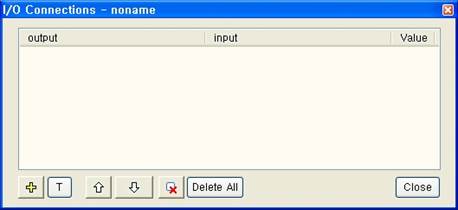
When you click on the  button, a new row will be added to the list. Enter the T path and the I/O signal name of each robot separated by the '/' as follows. (Type in after double clicking on the row. Or you can click on the T path button and select the robot from the tree window, and add the signal name.)
button, a new row will be added to the list. Enter the T path and the I/O signal name of each robot separated by the '/' as follows. (Type in after double clicking on the row. Or you can click on the T path button and select the robot from the tree window, and add the signal name.)
Click on the button again and enter the second connection in the same method. The results are as follows.
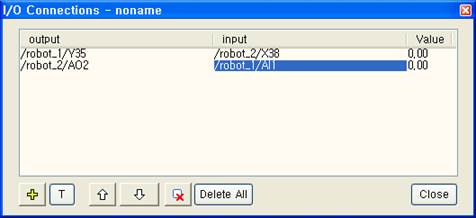
Click on the  button (or close button) to close the window.
button (or close button) to close the window.
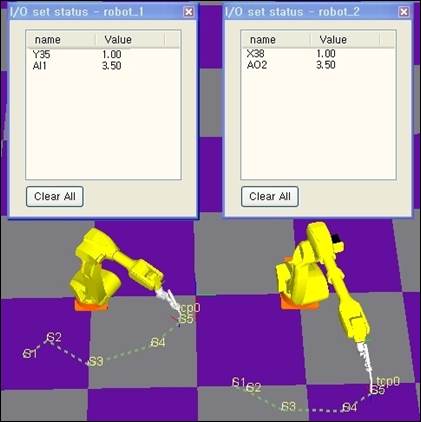
Open the individual popup menu of the two robots and select I/O status.
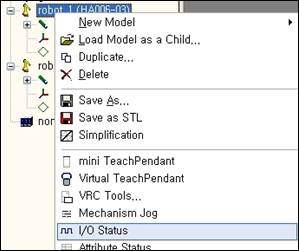
The names and values of the signal output/input from/to the robot are displayed on the I/O set status dialog box.

Now, play the robot and observe whether the waiting signal is done properly.