5.4. Cooperation Playback Stop/Restart
5.4. Cooperation Playback Stop/Restart
(1) If the user enters the stop command (external stop, internal stop) during cooperation operation, all the robots in cooperation stop.

(2) When restarted after being stopped, the slave robots need to be started first before the master robots are restarted. An error will be generated is the slave robot is not in collaborative standby condition.
(3) After stopping during cooperation operation, changing the step number and restarting the robot is only possible if the cooperation playback condition is disabled. In this case, the system requires the user to enter the R353 code as a warning.
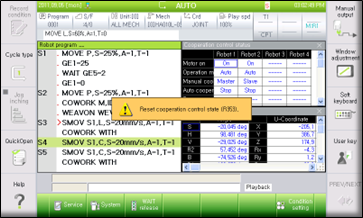
(4) When you enter the reset command (R353) for cooperation control condition, the operation resumes with the cooperation condition canceled. To operate with the cooperation condition maintained, designate the stop step number and execute the operation.