2.1.1. Emergency stop line connection
2.1.1. Emergency stop line connection
When there is an emergency stop during cooperation operation, the corresponding robot is also supposed to stop because it monitors each other through communication. But because the hardware signals have higher priority, the position of the cooperation robots is misaligned. To minimize this misalignment during an emergency stop, make the connections for external emergency stop.
An external emergency stop function for user is prepared in the Hi5 controller. The connection diagram of the external emergency stop is as follows.
When the robot cooperation function is to be used, an additional emergency stop switch needs to be installed at the same time to allow the input of emergency stop to be made into each control unit. It is required to combine the external emergency stop wire connections, prepared for the user, into one single emergency stop system and use it, which will minimize the misalignment in the cooperation position when the emergency stop occurs.
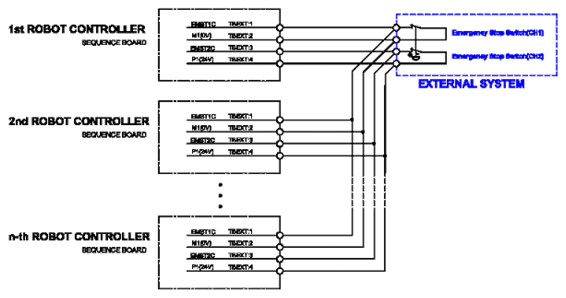
Figure 2.1 Emergency stop connection for cooperation robot
Caution
l There can be a misalignment of relative cooperation position in case of an emergency stop during cooperation.
l When applying the handling function, you must install the floating equipment to absorb the cooperation misalignment (emergency stop error, synchronization error, calibration error, trace error).
l When applying the handling function and installing the floating equipment, it is recommended to install at least 1 for 2 cooperation robots.