2.1.2. Setting the Prevention of Arm Interference
2.1.2. Setting the Prevention of Arm Interference
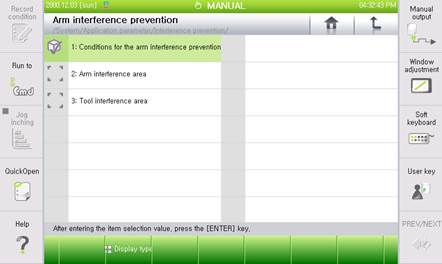
Select 『[F2]: System』 → 『4: Application parameter』 → 『7: Interference prevention』 → 『2: Arm interference prevention』.
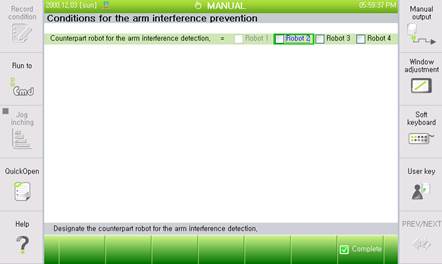
Select 『1: Conditions for arm interference prevention』and then select 'Counterpart robot for the arm interference detection' to set arm interference prevention to 'Enable'.
Causes for Possible Errors | Errors may occur in the following cases: When the counterpart robot designated for interference detection by the corresponding robot has set the Cooperation control to 'Null', when the counterpart robot is not connected to HiNet network for Cooperation control, when not setting the counterpart robot's condition of arm interference prevention, and when not setting the counterpart robot's common coordinate system. |
Error Message | E0244 Arm interference cannot be detected on robot 0). |
Action | Examine the following contents. |
Check the following criteria when above errors occur:
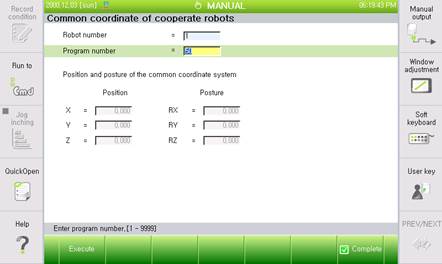
(1) Check that the Cooperation control of the counterpart robot is 'Valid' and that the common coordinate system is set. Check the setting of common coordinate system of the counterpart robot's TP under 『[F2]: System』 → 『6: Automatic constant setting』 → 『5: Common coordinate of cooperate robots』.
(2) Check that the corresponding robot is connected to HiNet network. HiNet network status displays the status of Robots 1~4 on the right side of the screen upon selecting 『[F1]: Service』 → 『1: Monitoring』 → 『10: Cooperation control data』→ 『1: Cooperation control status』. At this time, robots displayed as '----' have not been properly connected to the Cooperation control network. If this occurs, reconnect the robot's power to check normal indication. If the problem is not solved after reconnecting the power, reexamine the Cooperation control setting and check for faulty network lines.
