3.3.2. Forklift use
3.3.2. Forklift use
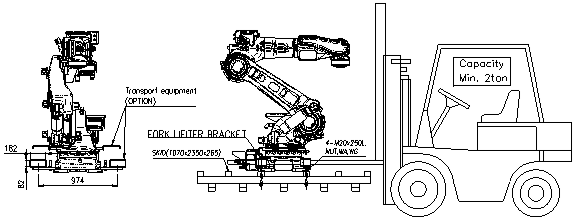
A forklift can be used to carry the main body of the robot.
For safety reasons, please pay attention to the following procedures:
l With reference to the pictures provided, use the standard position of each model.
l Fix the robot onto a pallet and insert the forklift fork into the pallet to carry it. The pallet should be strong enough to withstand the weight.
l Carry at a slow speed.
l Follow all safety regulations.
 NOTE
NOTE
l Do not lean against the robot while carrying it.
l Make sure the robot does not collide with the floor while loading and unloading.
l Pay attention to the relevant safety rules while using the forklift truck.
l Check the fixing bolts to ensure that the robot is securely fixed to the palette before starting work.
S- Axis | 0 |
H- Axis | 142 |
V- Axis | -52 |
R2- Axis | 0 |
B- Axis | -90 |
R1- Axis | 0 |
Figure 3.4 How to Transport : Using forklift