6.5.1. Zero Setting
6.5.1. Zero Setting
(1) Set the controller to teaching mode and set the robot to standby [ON] condition.
If the robot cannot be set to standby [ON] condition due to issues, use the brake cancel switch to set the reference location of the robot.
(2) Move each axis to the basic posture to align it with the scale or V-groove.
(3) Reset the Encoder. Refer to 『6.5.2 Encoder Reset』for the method of encoder reset.
(4) Correct the encoder. Refer to 『Controller Operation Manual』.
(5) Confirm that there is no problem in robot motion.
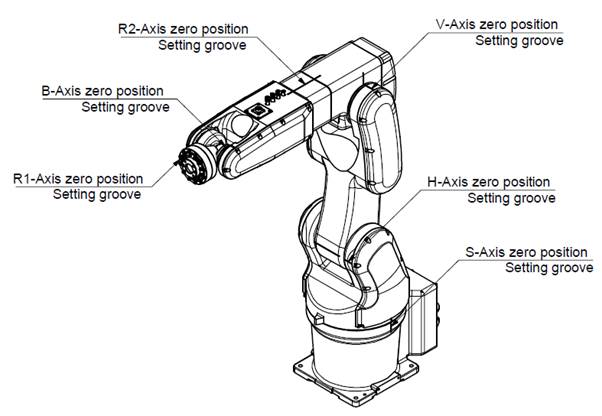
Figure 6.19 Zero point setting method [HH007C]