7.5.2. Robot type selection
7.5.2. Robot type selection
When ‘2: Robot type selection’ is selected, the list of robots that can be selected will be displayed as shown below. When the robot type is selected, the mechanical constant file (ROBOT.MCH) will be set to the initial values provided upon the shipping of the controller, and other history files will be initialized also. The robots are classified according to each weight-bearing capacity of the vertical articulated robot, and also the classification is also made according to the generation (G) of the LCD transfer robot.
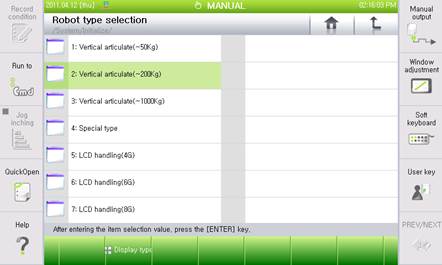
Figure 7.80 Robot type selection
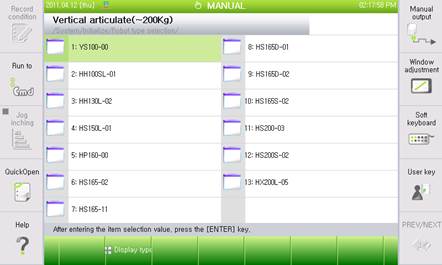
Figure 7.81 Vertical articulated robot type selection
When shipped, the robot controller and the robot main body are configured into one system. In the robot controller, a drive that fits the drive capacity of the robot is installed. Accordingly, if a reset needs to be performed according to the needs of the user, before performing settings, it is required to carefully check the type of robot set.