5.3.2.1.2. Gun movement while squeezing (pivot)
5.3.2.1.2. Gun movement while squeezing (pivot)
This function is used to move the gun during the squeeze process in the servo gun spot welding. The robot will move the designated distance in the designated direction at the designated speed at the set point of time for movement. With this function, the robot moves based on the tool coordinate, so the servo gun tool data, consumption, gun arm bending, teaching posture, and robot calibration may affect the performance. To effectively apply the function, the factors above should be continuously managed.
(1) Condition number
This displays the condition number for the multistep squeeze and auxiliary conditions.
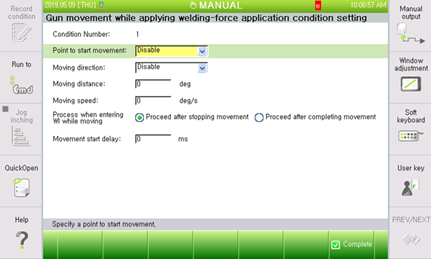
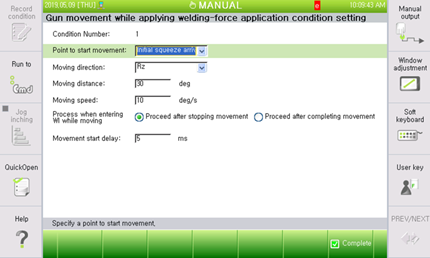
(2) Point of time for movement
This divides the spot process into [Initial squeeze force reached] → [Welding execution output] → [Welding complete input] and designates the time to start the movement.
(3) Movement direction
This selects the direction in which the gun moves based on the tool coordinate system.
(4) Movement distance [deg]
This sets the distance of the movement.
(5) Movement speed [deg/s]
This sets the speed of the movement.
(6) Handling when there is WI input during the movement
If the “Welding complete” status occurs while the robot is moving, it will be decided whether to stop moving or proceed to the next step after completing the movement.
(7) Movement start delay time
When the point of time for movement is reached, the robot will start to move after waiting for the delay time.