1. Overview
When mechanical parts (motors or reducers in particular) of the robot suffer failure and need to be replaced accordingly, their encoders should be corrected based on the existing origins and conditions in order to restart the existing teaching programs.
However, when the service engineers take measures manually regarding the above actions, they have to go through many trials and errors before setting the origin in some cases.
Considering this, the Hi5a controller provides an exclusive function for taking relevant actions easily.
※ What is the recovery to the origin after repairing mechanical parts?
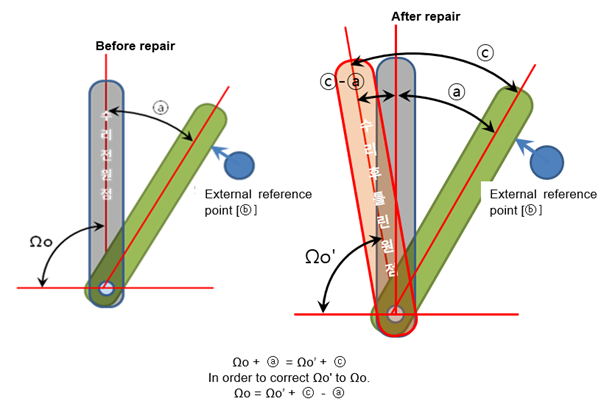
In other words, the recovery to the origin means…
To use an external reference point (dial gauge) to recover to the accurate origin Ωo after correcting the inaccurately corrected origin Ωo' by shifting the value to the ⓒ-ⓐ value, after a part is replaced.
 Precautions
Precautions
The position of the external reference point (ⓑ) should not be changed. In other words, its position must be the same before and after replacing the part.