4.3.2. Automatic calibration
4.3.2. Automatic calibration
Automatic calibration is a method to process five different robot poses stored in advance and PICKIT.FCP in a JOB file. Compared to the manual calibration, in automatic calibration, the JOB file is complex, and there is inconvenience of storing the robot pose in the variable in advance, while, instead, the same JOB file can be recycled when calibration needs to be performed later or applied to several robots in the same environment, which are advantageous points. When performing automatic calibration, it is required to set the JOB file for automatic and 1 cycle execution.
Figure 4 - 8 shows the automatic calibration flow chart
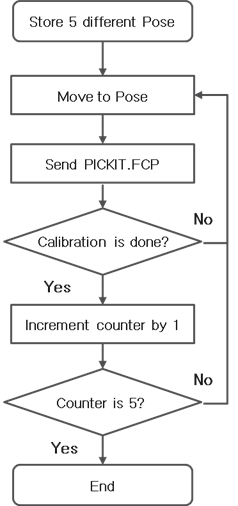
Figure 4-8 Automatic calibration flow chart
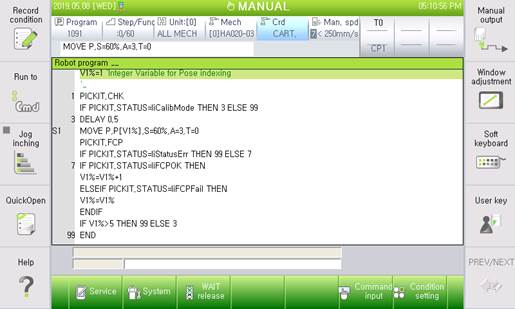
Figure 4-9 Automatic calibration JOB file
(1) While looking at the Pick-it setting screen, let the robot take five different poses using the TP, and then, store them in five pose variables.
(2) In the Pick-it setting screen, stop the Run mode, and move to the Calibration screen.
(3) Execute the Job file for the automatic calibration.
(4) Set 1 as the variable value to designate the pose number (for setting the first pose variable).
(5) Check the current Pick-it mode in Row 1 of the JOB file.
(6) If the Pick-it is not in the calibration mode, the JOB file execution should be ended.
(7) The robot will move to the position and posture of the pose variable relevant to the pose number designation variable among the pose variables inputted in advance.
(8) After moving to the position of the pose variable, the robot will execute the PICKIT.FCP statement.
(9)The Pick-it equipment will receive and process the PICKIT.FCP command and send the processing result to the robot.
(10) If there is no response from the Pick-it equipment, PICKIT.STATUS will contain an error value (-1). Then, the robot will end the JOB file execution.
(11) If the Pick-it equipment succeeds in carrying out calibration normally, the pose number designation variable will be increased by 1. If it fails, the pose number designation variable will be left as it is without being increased.
(12) If the pose number designation number is 5 or below, it is required to move to the step (7) and perform calibration continuously. If the number exceeds 5, it means the completion of calibration. Then, the calibration work will be completed.