4.3.1. Manual calibration
4.3.1. Manual calibration
In manual calibration, it is required to send the PICKIT.FCP command after manipulating the robot position and pose using the TP while checking whether the calibration plate can be seen through the Pick-it control screen. Figure 4-6 shows the manual calibration flow chart.
The manual calibration can be described as briefly as the following: move the robot using the TP, and check whether the calibration plate is seen through the Pick-it setting screen. Then, manually select and send the PICIIT.FCP command in the JOB file using the TP. Considering that the work is performed by looking at the calibration plates in the Pick-it setting screen, it is possible to carry out calibration while flexibly corresponding to the processing results.
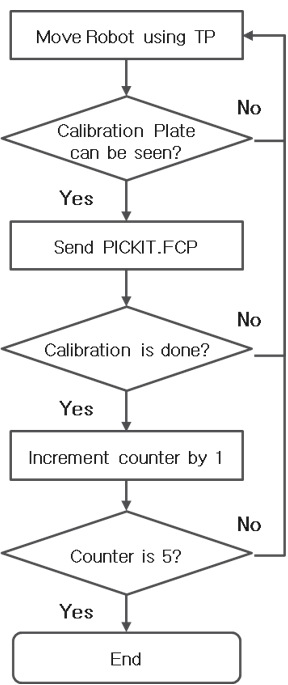
Figure 4-6 Manual calibration flow chart
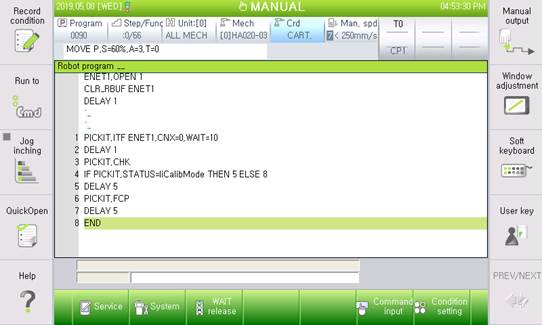
Figure 4-7 Manual calibration JOB file
The method to carry out manual calibration is described together with the JOB file as below. This method must be performed with the robot controller in manual mode. Set the execution unit as Cmd and carry out the operation using the “STEP FWD” and “STEP BWD” keys.
(1) In the Pick-it setting screen, stop the Run mode and move to the calibration screen.
(2) In the JOB file, perform calibration up to the variables useful for settings in the unit of Cmd. (Refer to the JOB file in the appendix for the detailed definition of variables.)
(3) Perform calibration up to the Ethernet setting statement in the unit of Cmd.
(4) Perform calibration up to the PICKIT.ITF interface setting, as described in the statement of Row 1 in Figure 4-7. In this process, it is required to set CNX=0 to deactivate the function of sending the robot pose to the Pick-it equipment periodically.
(5) When reaching Row 5 after performing calibration from Row 2 up to Row 4, it is required to stop JOB file execution and then change the position and posture by moving the robot using the TP jog. In this process, while looking at the Pick-it setting screen, check whether at least three of the markers on the four corners of the calibration plate can be seen while the calibration plate is captured by the screen.
(6) Move to the PICKIT.FCP statement and perform calibration in the unit of Cmd. The DELAY statement in the JOB file is for acquiring the time for stopping Cmd execution before moving to the next statement.
(7) Until the entire calibration process is completed, perform the above (5) and (6) steps five times in total by moving to the PICKIT.FCP statement.