4.2.2. Methods of calibrating according to camera mounting position
4.2.2. Methods of calibrating according to camera mounting position
There are two methods of using the calibration plate depending on how to install the Pick-it camera. The camera installation method is divided into the method of attaching the camera on the robot arm and the method of installing it on a fixed support instead of the robot.
First, in the method of installing the camera on the robot arm, it is required to fix the calibration plates on the floor and then take a picture of the calibration plate by moving the robot pose along with five different positions and postures. If the camera needs to be mounted to a fixed support rather than a robot, the calibration plate should be installed to the robot flange and should be taken a picture of by posing the robot along with five different positions and postures. Both methods go through the same procedures in that the calibration should be performed by taking a picture of the calibration plate along with five different positions and postures while differing only in the camera installation position.
Figure 4-2 shows how to install the camera on a fixed support outside the robot and calibrate the Pick-it equipment to the robot. As shown in the figure, the camera is installed at a position where the workpiece can be seen well, and the calibration plate is mounted on the robot flange. To calibrate the Pick-it equipment to the robot coordinate, it is required to move the robot to a different position and posture and then make the robot send the PICKIT.FCP command to the Pick-it equipment each time, as shown in Figure 4–3. The entire process should be performed five times in total. The precaution to take when the robot takes a position and posture is that at least three of the markers on the four corners of the calibration plate should be seen through the camera. For detailed procedures and precautions for calibration, refer to the Pick-it Manual.

Figure 4-2 Camera attached to a support

Figure 4-3 Change of posture for calibration with the camera attached to a support
In the method of attaching the camera on the robot flange, as shown in Fig. 4-4, fix the calibration plate on the floor and perform the calibration procedure by changing the positions and postures of the camera and robot. In this case, the robot should send the PICKIT.FCP command to the Pick-it equipment whenever taking a different position and posture. The precaution to take is that at least three of the four markers on the four corners of the calibration plate should be seen through the camera picture-taking region in the same manner as shown above.

Figure 4-4 Camera mounted on the robot flange
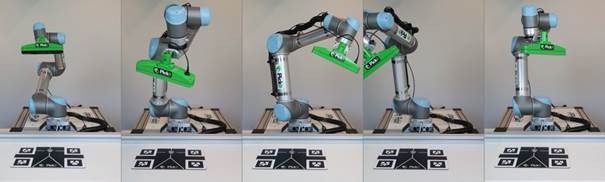
Figure 4-5 Change of posture for calibration with the camera attached to the robot flange