4.3.10. Palletizing and slip sheet motion program
4.3.10. Palletizing and slip sheet motion program
The palletizing and slip sheet motion program is a combination of the Move statements that are needed to move the robot. The standard program needs 4 position values (package, pick up, near place down, and place down) to operate continuously. The 4 values are to be defined using the pickup height values designated in 4.3.5 Home position and workpiece position pose program, 4.3.8 Pallet coordinate creating program, and 4.3.4 Initialization of variables and signals. The home position means an initial position to move to when other workpiece enters or when there is a need to carry out noncontinuous operations, such as moving to insert slip sheet. When looking at the lines #3~#5, we can know that this will be executed only when there is a change.
If needed to add another via point somewhere between S4, UP, and S5 Near Place Down, it is necessary to add a new Move statement between S4 and S5.
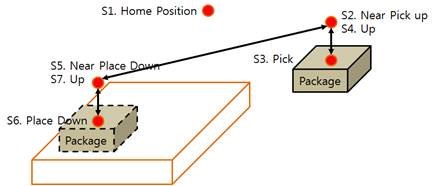
Figure 4.5 Palletizing motion position values
Program 7 Program for pallet motion
Program File Format Version : 1.6 MechType: _MECHTYPE TotalAxis: _TOTAL_AX AuxAxis: _AUX_AX 1 ''Palletize Job Program 2 CALL 701 'Motion parameter setting 3 IF V%[6]<>V%[5] OR V%[7]<>V%[8] THEN 4 S1 MOVE P,P[1001],S=90%,A=1,T=0 'Home Position 5 ENDIF 6 S2 MOVE P,P[1002],S=90%,A=5,T=0 'Near Pick up 7 S3 MOVE L,P[1003],S=90%,A=0,T=0 'Pick 8 CALL 0051 'Vaccum On 9 S4 MOVE L,P[1004],S=90%,A=5,T=0 'Up 10 S5 MOVE P,P[1005],S=90%,A=5,T=0 'Near place down 11 S6 MOVE L,P[1006],S=90%,A=0,T=0 'Place down 12 CALL 0050 'Vaccum Off 13 V%[31] = V%[31] + 1 'Count increase 14 V%[8] = V%[7] 'Previous package, slip sheet number saving 15 S7 MOVE L,P[1007],S=90%,A=5,T=0 'Up 16 END |