2.11.1. Overview of the Multitasking Motion
2.11.1. Overview of the Multitasking Motion
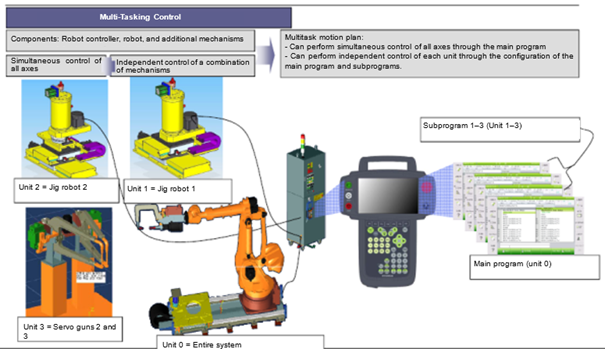
If multitasking is applied, it is possible to configure an independent program by assigning the program controlling the additional axis as a subtask program. As the figure below shows, individual subtasks can independently drive additional axes by designating units so they do not overlap with each other. The main task can control both the robot and the assigned additional axes, but the subtask can only control the assigned axes.
To use this function, it is necessary to set the unit and mechanism and use the AXISCTRL command. A brief definition is given below.
l A mechanism is a combination of axes (robot axis, additional axis) configured in one set, and it is possible to select one mechanism with a jog and perform the operation based on each mechanism.
l A unit is a selective combination of mechanisms, and the difference between a unit and a mechanism is that when steps are recorded in a work program, they will be recorded based on each unit.
l AXISCTRL is a statement about the setting of the additional axes control.
For a more detailed explanation and about the methods of setting the mechanisms and units, please refer to the relevant contents of “Hi5a Controller Operation Manual”.