1.1.About the Multitasking Function
1.1.About the Multitasking Function
The Hi5a controller can perform an independent execution of each of eight programs (JOB files) simultaneously. Such multitasking control, performed through this independent operation method, is called the “multitasking function.”
Using the multitasking function makes it possible to execute a program to control another device while executing a robot control program simultaneously. Through this, the control of the robot and other devices can be performed independently of each other. If necessary, cooperative work is possible with the robot and other devices synchronized with each other, providing an advantage in executing complicated and difficult application works.
The figure below shows the existing single-tasking structure (previous Hi5 controllers of version 30.00-00 series). In this structure, only one task exists, making it impossible to perform an independent execution of two or more programs simultaneously. In comparison to the multitasking structure to be described later, you can think that there is only a main task without a subtask. Please refer to Figure 1.1 below.
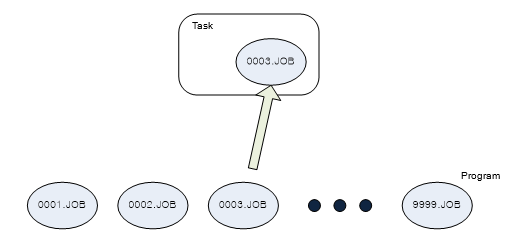
Figure1.1 Single-tasking structure
Figure 1.2 below shows the multitasking structure supported by Hi5a. As up to eight tasks can be performed simultaneously, it is possible to perform an independent execution of each of eight programs simultaneously by assigning one program (JOB file) to each task. It is possible to perform an independent control of each of multiple devices by performing eight tasks simultaneously. However, when it comes to controlling a robot, only one robot can be controlled in the main task. When performing a synchronized work using multiple robots simultaneously, it is necessary to use the cooperative control function that our company provides.
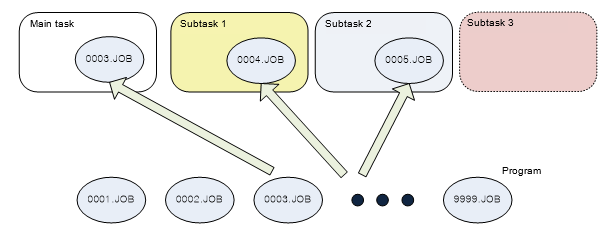
Figure 1.2 Multitasking structure
The names of the tasks executing the programs are as follows.
l Main task
l Subtask 1
l Subtask 2
l Subtask 3
l Subtask 4
l Subtask 5
l Subtask 6
l Subtask 7
The main task will be always created and exist by default to execute a JOB program. Subtask 1, subtask 2, and subtask 7 (hereinafter “subtask 1/2/3/4/5/6/7”) can be created and terminated as necessary. A subtask will be created automatically when the TaskStart statement is executed in the main task program or when it is executed in the subtask program created in the main task. In other words, it is possible to give a command to create a subtask even in an operating subtask. Refer to Figure 1.3 for the subtask creation structure. The subtasks will be terminated automatically when the END statement in each subtask program is executed.
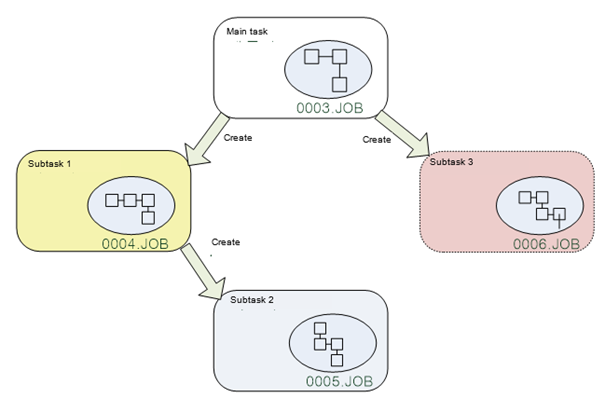
Figure1.3Creation of Subtasks in Multitasking Structure