1.1. Purpose of the function
1.1. Purpose of the function
The purpose of this function is to ensure that the robot is free from vibration while making a high-speed motion. A kinetic model of the robot is utilized for controlling its motion, but it is not always accurate. Therefore, making the inaccurate model accurate by making the robot learn motions by repeating the steps of the learning program for a number of times can set the robot so that it makes motions at a higher speed with less vibration.
The accuracy of the kinetic model of the robot varies depending on the locations, positions, and load conditions of the robot. Therefore, the robot needs to learn the model to meet its locations, positions, and load conditions thatarechangedaccording to the steps taught by the user. This function utilizes a method in which the user designates steps and inputsoptions to the steps for the robot to learn.
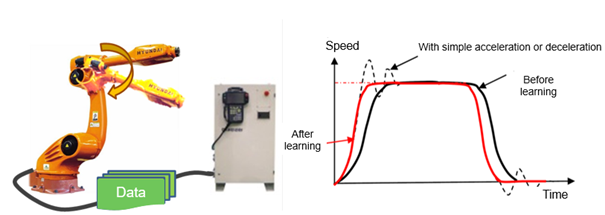

Figure1.1 Concept of the learning control function