2.2. Controller setting
2.2. Controller setting
This sets the communication and robot number etc. for cooperation control of the controller.
(1) Select 『[F2]: System』 → 『2: Control Parameter』 → 『9: Network』 → 『3: Service』.
(2) Select 『1: Cooperation Control』.
(3) Set the parameters of the dialog box. The parameters have the following purposes:
n Cooperation control function <Disable. Enable>
Select whether to use the cooperation control function.
n Group number: <1~6>
This designates a number for the group of robots. The cowork control function applies only to the robots that belong to a group. The robots that will be subject to the cowork control should be designated as a group. However, for robots from another group, the HiNet I/O applies commonly.
n Robot number: <1~4>
This designates a number for a robot. The robot number is a number for recognizing its controller on the network connected through the cooperation control. In case of the Hi5 controller, up to 4 robots can be configured in the cooperation network. Be careful not to allow the robot number not to be duplicated while setting.

l Only the HiNET communication should be applied for special robots and the robots whose degree of freedom is 6 or lower, the COWORK command can not be used.
l The cooperation control is an optional item. In order to use the control COWORK command, the license key should be registered. While the temporary key can be used for one month, it is required to contact the company if you have any question if you want to use the key for a longer period than that.
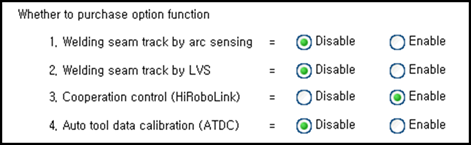
Figure2.3 Setting of the cowork control (HiRoboLink) license key option