5.7. Welding auxiliary condition– Automatic stick recovery
5.7. Welding auxiliary condition– Automatic stick recovery
When arc welding finishes, wire may stick to the base metal in some cases. In order to prevent this situation, the welder will increase voltage temporarily as a prevention measure when ending the welding. In some cases, sticking occurs even after taking the stick prevention measure. For this reason, the robot controller sends the stick check signal to the welder after performing welding to check for sticking.
The auto stick recovery function is used to perform the stick recovery operation automatically when stick is detected after welding to allow the robot to continue the work without stopping. When the function is used, the stick recovery process will immediately supply a certain level of voltage when stick is detected. The auto stick recovery will be repeated according to the set count. If stick occurs even after the stick recovery process exceeds the set count, the 『Stick in progress』 signal is outputted and the robot will stop.
The following edit screen will be displayed when pressing [F1: Aux. cnd] key in 『[Welding start condition] → [F2: End cnd]』 dialog box while arc welding is set to digital.
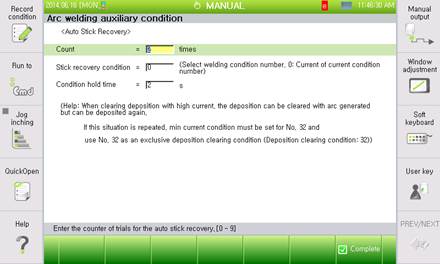
Figure 5.13 Automatic stick recovery dialog box
The content per each item of the automatic stick recovery condition is as follows.
(1) Count: [2] time ( Range : 0 ~ 9 times)
It is the maximum number of times to repeat stick recovery processing. When the stick is not recovered within the set count, a stick related error (“E1262 Wire stick being detected”) will be output. As an exception, when “0” is set, the stick check will not be performed and the robot will move to the next step directly.
(2) Stick recovery condition: [ 0] ( Range : 0 ~ 32 )
This is the welding condition number used when handling the stick recovery process. When the entered condition number is “0” the stick recovery process will take place according to the the welding start condition that is being implemented.
(3) Stick recovery time: [ 2] sec (Range: 0.00 ~ 9.99 )
This is the time during which the stick recovery condition output is maintained. If this is set too low, the stick recovery will not be implemented successfully.