10.3.7.6. HiNet variable
10.3.7.6. HiNet variable
You can send the variable status through HiNet connected to the collaborative network. Each controller monitors the signal between the collaborative robots and assigns the I/O for the part that is set to share so that the input and output are freely used. The size of the output that each controller can use is 4byte.
Use this variable so that the collaborative network can be applied to usages including detection of signal I/O without external interlock signal based on the robot language (HR-BASIC).
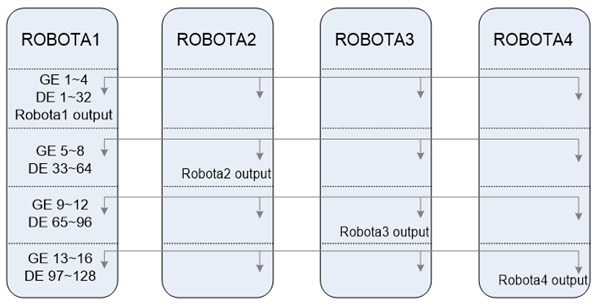
Figure 10.2 HiNet I/O
Table 10‑2 Output/Input area by robot number
Robot number | GE (OUT) | GE (IN) | DE (OUT) | DE (IN) |
Output area assigned | Input area assigned | Output area assigned | Input area assigned | |
Robot 1 | 1~4 | 5~16 | 1~32 | 33~128 |
Robot 2 | 5~8 | 1~4, 9~16 | 33~64 | 1~32, 65~128 |
Robot 3 | 9~12 | 1~9, 13~16 | 65~96 | 1~64, 97~128 |
Robot 4 | 13~16 | 1~12 | 97~128 | 1~96 |
(1) DE/DE[ ] command
DE command is the variable used to access and assign the self output area in HiNet I/O function in 1 bit unit.
DE[{subscript}]={Parameter} | |
Subscript | ․Designate I/O output signal (1~128) 0 : Select all I/O bit 1~128 : Select applicable I/O bit |
Parameter | ․On/Off setting 1 : On 0 : Off |
(2) GE/GE[ ] command
GE command is the variable to access and assign the self output area in HiNet I/O function in 1 byte unit. It can read the value in 1byte for all areas including the self.
GE[{subscript}]={Parameter} | |
Subscript | ․Designate input signal group (1~32) 0 : Select all I/O group 1~32 : Select applicable I/O group |
Parameter | ․Designate I/O signal of 1byte. (0~255) |
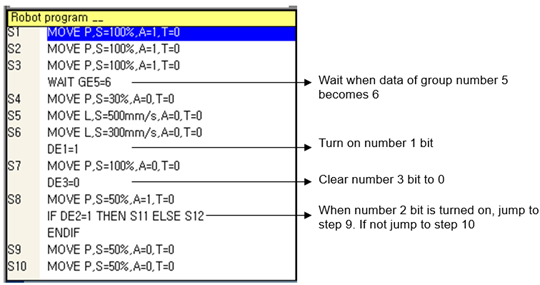
(3) Example of application
Even though we can’t describe all the examples of various applications using the robot language, the following screen displays a simple example. Because DE and GE are I/O that can be used as a variable, it has the advantage of being applied to various applications.