4.2. Example of the batch operation of the cooperation control system
4.2. Example of the batch operation of the cooperation control system
The following shows an example of the operation based on the teach pendant sharing function in a cooperation control system that uses 2 robots.
The following explains only about the batch operation assuming that the settings of the network (HiNet) and common coordinates for the cooperation control are completed already.
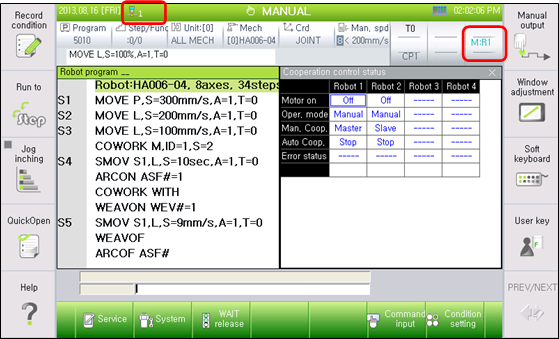
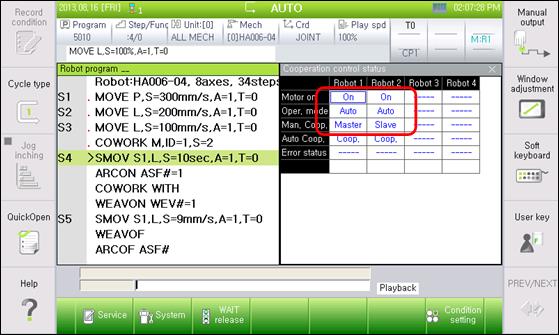
Eneter [R..]+351 for the #1 robot (Master), and then enter 1 to set the manual mode cooperation control status as ‘Master’.
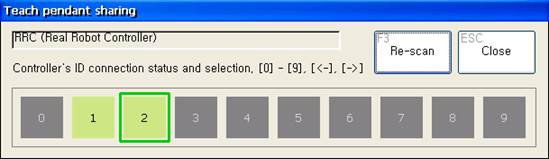
Click [Shift]+5 to change the teach pendant connection to the #2 robot that is to be used as ‘Slave’.
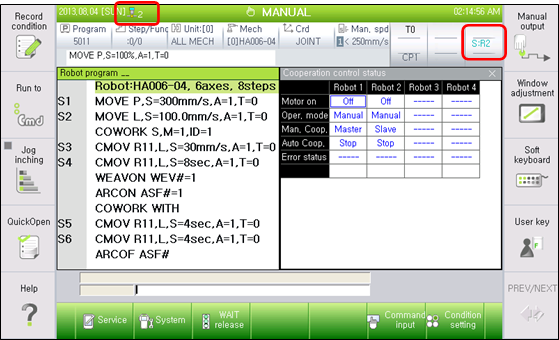
Eneter [R..]+351 for the #2 robot (Slave) then enter 2 to set the manual mode cooperation control status as ‘Slave’
Click [Shift]+5 again to change the teach pendant connection to the #1 robot.
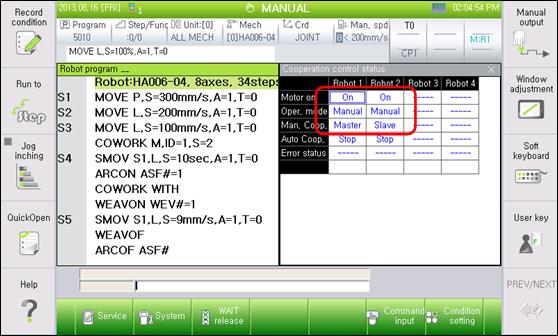
Click the [Motor On] button and push the [Enable] switch of the teach pendant to check whether the slave robot motor is turned on.
Change the [Select] switch to ‘Auto’ and the push the [Start] button to carry out the cooperation control operation.
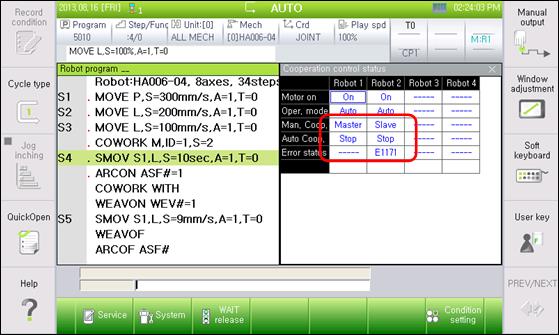
If an error occurs to a controller to which the teach pendant is not connected currently, the ‘Cooperation control status’ monitoring window will display the ‘error state’.
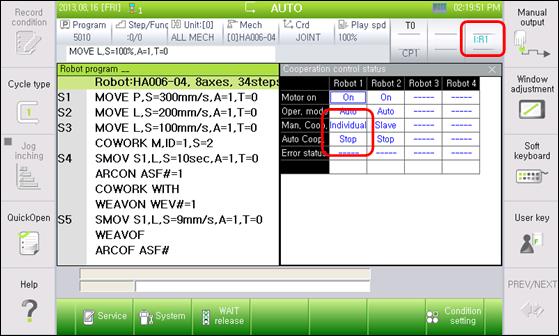
In order to operate a robot alone by releasing the cooperation control system batch operation, enter [R..]+351 and then enter 0 to set the manual mode individual operation.

This function manual does not explain about details regarding the functions of the cooperation control. Refer to the ‘Hi5 Controller Function Manual: Cooperation Control’ for more information about them.
When a robot is operated based on the cooperation control mode, it is highly possible for a robot to suffer interference with adjacent structures. Users must check the working area of robots before playing back the robots.