4.1. Specification for the batch operation of the cooperation control system
4.1. Specification for the batch operation of the cooperation control system
A cooperation control system consists of 1 master system and 1~3 slave systems.
In general, cooperation control system for each system is connected to the teach pendant. But, if you use this function, one teach pendant can control the system.
The following shows the conditions for the batch operation of the cooperation control system.
1. The manual mode cooperation control status of the controller that is connected to the teach pendant is set as ‘Master’
2. The manual mode cooperation control status of the controller that is disconnected from the teach pendant is set as ‘Slave’
3. When the teach pendant is connected to a controller that is set as ‘Slave’, it is only possible to operate the relevant system alone.
The following table can be performed in a batch operation is a list of the button.
Button names | Button icons | Explanation |
Motor On |
| Button used to supply Servo power to the motor in each axis of Robot. If becoming [MOTOR ON] status by pressing this button, the [MOTOR ON] lamp flickers in Manual mode, and the [MOTOR ON] lamp turns on in AUTO mode. |
Start |
| Button used to automatically operate created program. If AUTO operation of Robot is started, the [START] lamp turns on and the [STOP] lamp turns off. |
Stop |
| Used to temporarily stop Robot during AUTO operation. If Robot stop, the [STOP] lamp turns on and the [START] lamp turns off. When the robot stops, there is no risk of colliding with other devices because it stops on the originally planned path. |
Select |
| This is the switch to change among |
Emergency Stop |
| Used in emergent status where there is risk that Robot may collide against peripheral units during operation. This is button for Motor Off breaking Servo power to Robot motor and the [MOTOR ON] lamp turns Off. ※ This button is for the batch operation regardless of settings. |
Step Forward/ Backward |
| This button is for bringing forward or backward the job program in the manual mode by the unit of individual commands, steps, or programs. |




 (REMOTE),
(REMOTE),  (AUTO) and
(AUTO) and  (MANUAL) mode. In the REMOTE mode, the mode is decided by the MANUAL mode and AUTO mode signal of the input allocation signal.
(MANUAL) mode. In the REMOTE mode, the mode is decided by the MANUAL mode and AUTO mode signal of the input allocation signal.

The following conditions should be in place to meet the conditions for the batch operation.
1. TP needs to be connected to a robot that is to be operated as a mater robot.
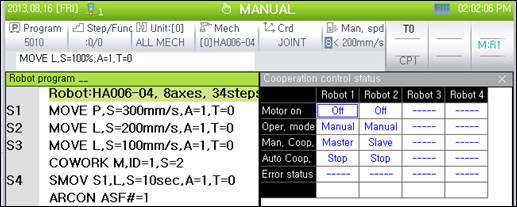
2. The manual mode cooperation control status of the master robot needs to be set as “master”
A. The manual mode cooperation control status can be set by entering [R..]+[351] and then enter 0~3. Enter 1 for setting a controller as a master.
(0: Individual, 1: Master, 2: Slave, 3: CMOV record mode)
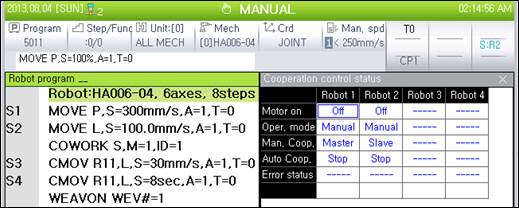
B. If the setting is carried out normally, the current manual mode cooperation control status will be displayed on the top right section of the teach pendant.
3. The manual mode cooperation control status of the slave robot that is to be operated through the batch operation needs to be set as ‘Slave’
A. Enter [R..]+[351], and then enter 2 to set the manual mode cooperation control status as ‘Slave’.
B. If the setting is carried out normally, the current manual mode cooperation control status will be displayed on the top right section of the teach pendant.