4.2. Servo Hand Squeeze/Opening
4.2. Servo Hand Squeeze/Opening
The operation of squeezing or opening of the servo hand axis for handling a workpiece is as shown in the following figure.
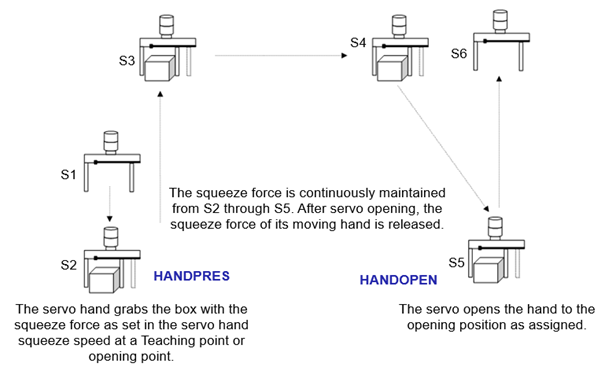
Figure 4.1 The operation of squeezing or opening of the servo hand for handling a workpiece
(1) If the step where HANDPRESS function is recorded is used, the robot moves to the position as recorded from the previous step position. The servo hand’s moving axis moves to the point where the squeeze offset distance of the HANDPRES function is added to the recorded position. Meanwhile, both the robot axis and the servo hand axis reach the target position at the same time.
(2) Start squeezing with the squeeze force as defined. This time, the movement speed corresponds to the servo hand’s squeeze speed.
(3) When the squeeze force matches, grab a workpiece and move to the step for loading.
(4) Move to the step where HANDOPEN function is recorded and open the servo hand to the opening position as set. Meanwhile, the servo hand axis reaches at the maximum speed.
(5) Once opening is complete, move to the next step.

l In Manual mode, step forward/backward is always available for operating regardless the selection of the step forward/backward function in the configuration.
l Servo hand axis’ squeeze/opening positions should not exceed the soft limit position.
l A desired work may not be fulfilled if squeeze force of the servo hand axis is too weak.
l Consider the distance between a workpiece and the position to start squeezing to adjust the accuracy level of the step that contains HANDPRES function.