4.3. PROFINET IO-Controllersetting
4.3. PROFINET IO-Controllersetting
The following procedure should be observed for the configuration of PROFINET IO-Controller at the robot controller:
(1) Select 『[F2]: System』 → 『2: Control parameter』 → 『2: Input/Output signal setting』 → 『14: BD525 real-time Ethernet setting and diagnosis』
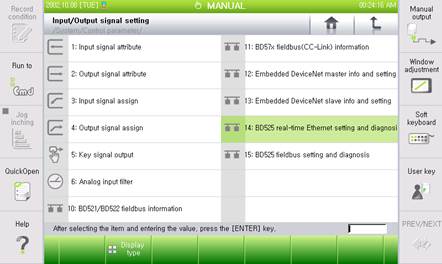
Figure 4.2 Real time Ethernet setting and diagnosis menus
(2) As the PROFINET IO-Controller corresponds to the channel 1, use the 『[F3]: Previous』 or 『[F4]: Next』 key to shift to the channel 1, and then check whether Device Type shows “PROFINET IO-Controller”.
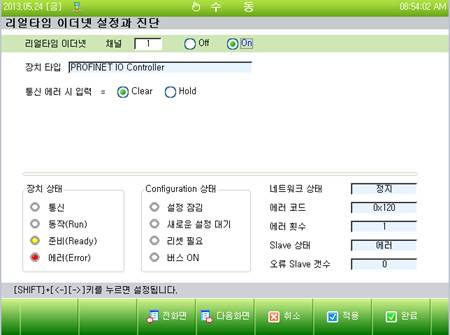
Figure 4.3 PROFINET IO-Controller setting screen
(3) Can select an option regarding how to handle the input when a communication error occurs. When the option is set as “Clear”, the input data (FB1.X) will be cleared to be “0. On the contrary, if it is set as “Hold”, the last valid value that is to be generated when the error occurs will be maintained.
(4) In order to use the PROFINET IO-Controller, shift it to the “On” position and then click the “Apply” or “Complete” button.