2.11.2. Example of Application of Multitasking Motion
2.11.2. Example of Application of Multitasking Motion
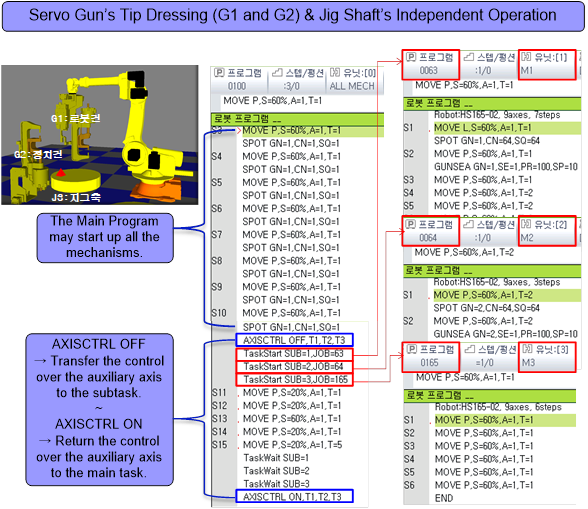
The users may be informed of how to use the function through examples of the application of multitasking motion to the system with three (3) auxiliary axes, consisting of the jig shaft, robot and stationary guns as shown in the following Fig.
(1) The main program is the program # 100. The main program may start up all the axes by selecting the unit 0. When the main program runs, and the commands of the MOVE and STOP run in turn, executing commands to Step 10.
(2) Then, if the main program runs the commands of the AXISCTRL OFF T1, T2, and T3, the designated axial numbers are set to be controlled by the subtask. As the result, they are not moved to the positions of T1, T2, and T3 recorded in the Step 11-15 of the main program.
(3) By means of the TaskStart command, programs run by the subtask 1/2/3 shall be set. The allocated program to the subtask must be set as an independent unit, and the axis designated as a unit between the subtasks must not be overlapped. For example, the unit 1 is set as an axis of mechanism M1=T1, and the unit 2 and 3, as axes of mechanism M2=T2 and M3=T3, respectively in an exclusive way with each other.
(4) The programs of 0063, 0064, and 00165 allocated to the subtasks by means of the StartTask command are executed, and the main program runs the Step 11-15.
(5) When the TaskWait command is executed by the main program, the designated subtask has been completed and is on standby until the END command is executed. Therefore, the main program waits until the subtask 1/2/3 end.
(6) For the main program to obtain the control over the auxiliary axis again, the AXISCTRL ON command shall be executed.