3.2. The start of service and LOADF/SAVEF
3.2. The start of service and LOADF/SAVEF
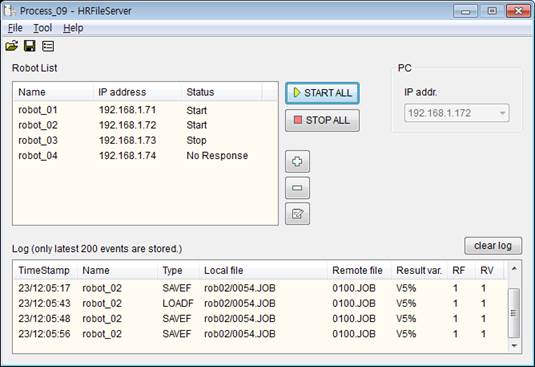
The meaning of status column in Robot List is as below;
Table 3‑1 The meaning of status column
Status | Meaning |
No Response | No ping response from the robot’s IP address. Check out whether; 1) The robot controller is turned-on. 2) The IP address is correct. 3) The Ethernet cable is correctly connected. |
Stop | File service is not started. |
Start | File served is started. It is waiting LOADF, SAVEF events from the robot. |
If it is ‘No Response’, you have to check it. If there is no robot in ‘No Response’ status, click  button to start the services. (If there is a robot stays in ‘Stop’, try turning off and on the Hi5 controller.)
button to start the services. (If there is a robot stays in ‘Stop’, try turning off and on the Hi5 controller.)
For example, let’s suppose that the base path in Tool - Option menu is specified as below;
U:/HRFileServer/Proc_09 |
If the LOADF statement is executed with below parameters in robot controller,
LOADF V5%,EXT,”rob02/0054.JOB”,”0010.JOB” |
HRFileServer copies PC’s source file to robot controller’s target file as below;
Source(PC) | U:/HRFileServer/Proc_09/rob02/0054.JOB |
Target(Robot controller) | 0010.JOB |
If the SAVEF statement is executed with below parameters in robot controller,
SAVEF V5%,EXT,”rob02/0054.JOB”,”0010.JOB” |
HRFileServer copies robot controller’s source file to PC’s target file as below;
Source(Robot controller) | 0010.JOB |
Target(PC) | U:/HRFileServer/Proc_09/rob02/0054.JOB |
(If this option is empty, the PC-side absolute path filename has to be specified in LOADF or SAVEF statement.)
Now, everything is all set. Start the robot process.