2.1.4.2. Robot 2
2.1.4.2. Robot 2
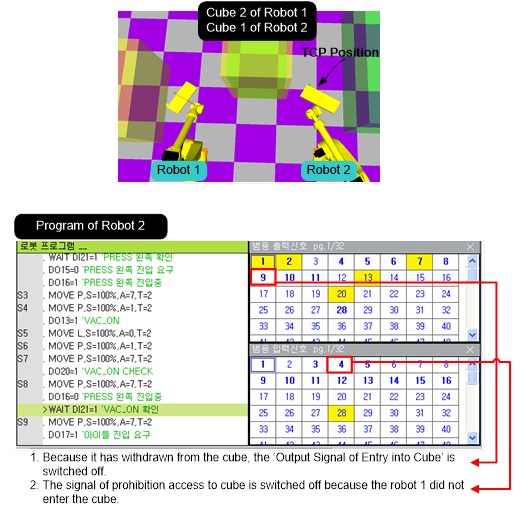
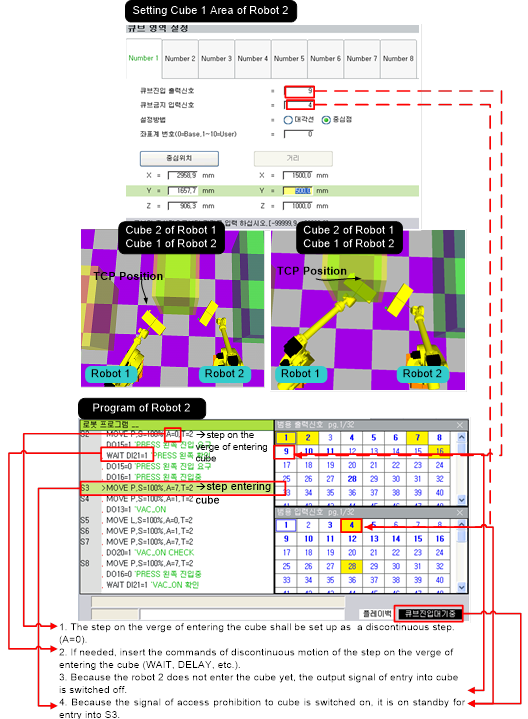
(1) The Robot 2 is fully ready to enter the common cube area (Cube 1)
àBecause the robot 1 has first entered the area and is doing its job, the robot 2 automatically stops and is in a standby mode (“on standby for entry into the cube”)
(2) After the robot 1 withdrew, the robot 2 has entered the common area (Cube 1)
àThe output signal of entry into cube of robot 2 is switched on.
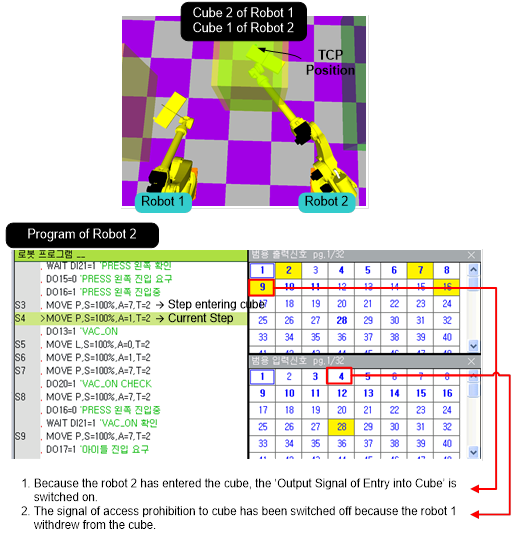
(3) The robot 2 has withdrawn from the job area.
àThe output signal of entry into cube of robot 2 is switched off and cleared.