2.1.3. Setting Cube I/O Signals for the Common Cubearea
2.1.3. Setting Cube I/O Signals for the Common Cubearea
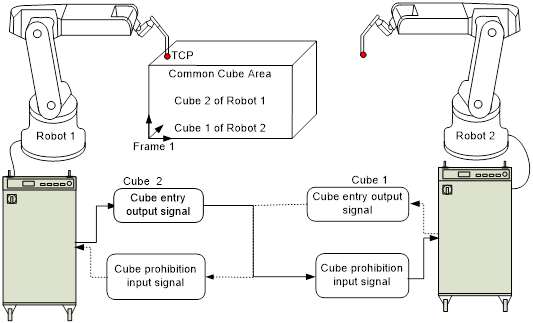
The common cube area shall be set up in the same area of each robot’s space. In order to create the common area by means of the same area, first, the two robots’ TCPs shall be set up precisely, then the TCPs are moved to the same position in space so as to set the cube’s position (refer to the methods of setting diagonal and Center Points) and the cube’s size shall be also determined in the same way.
Function of automatic mutual Interlock for the common cube area
As seen in the above figure, when the output signal of entry into cube of robot 1 is connected to the input signal of prohibiting access to cube of robot 2, and if the robot 1 is equipped with the conditions to enter the common cube prior to the robot 2, the robot 2 stops and is in a standby mode.
In the same manner, if the output signal of entry into the cube of the robot 2 is connected to the input signal of prohibiting access to cube of the robot 1 and the robot 2 is equipped with the conditions to first enter the common cube area, the robot 1 stops and is in a standby mode.