5.4.1. Outline
5.4.1. Outline
To use the robot as the Slave from the field bus configured with CC-LINK communication, CC-LINK board (BD570) must be used, as shown in Figure 5.19 below. To block various types of noise and surges from the external environment of the robot, various signals are insulated from the external side.
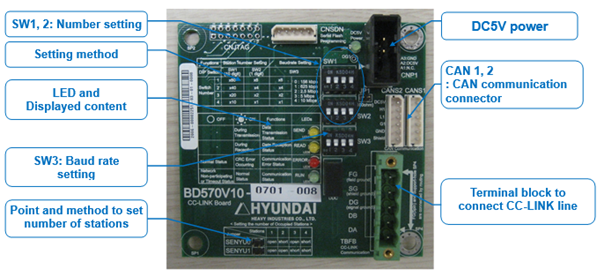
Figure 5.19 CC-LINK Board (BD570)
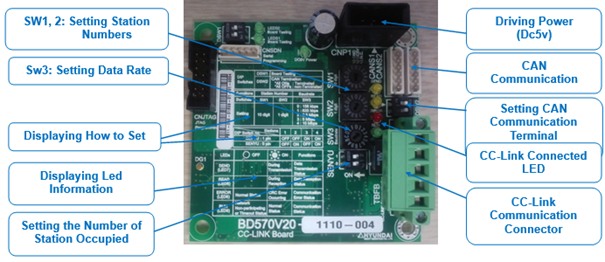
Figure 5.20 CC-LINK Board (BD570V20)