1.1. Overview of jig robots
1.1. Overview of jig robots
A jig robot makes linear movements in X, Y, and Z directions. The arrangement of multiple jig robots plays the role of jig for manufacturing processes.
This product can be used in any of the following cases:
n where the position control of fixed jigs is necessary for process purposes
n where multiple product models are manufactured, requiring multiple workpieces
n where developed products are continually added to an existing mass-production process
Typically, one controller (12 axes) controls four 3-axis jig robots or three 4-axis jig robots.
Controlling a maximum of four jig robots (48 axes in total, 12 axes per controller) is possible in a linked manner using the cooperative control function.
One program can make the robots perform both independent and cooperative operations.
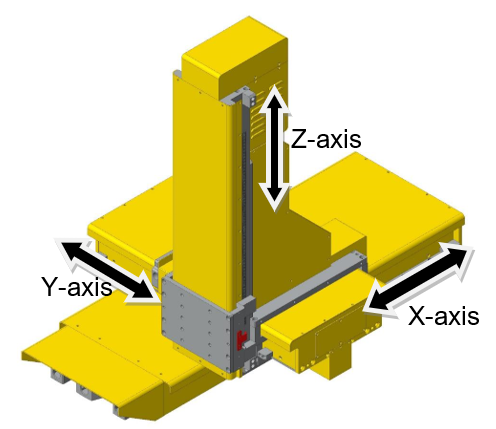
Figure 1.1 Jig robot