2.3. Example program
2.3. Example program
Chamfering work
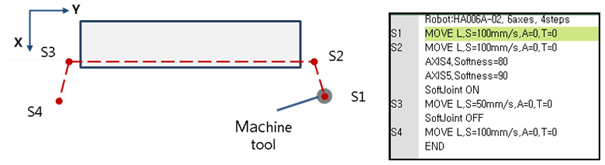
Movement of the robot | § Move from S1 to S2, which is the point of starting the processing § After the SoftJoint is turned on, the robot will carry out chamfering while moving to S3. § Move to S4 after the SoftJoint function is turned off. |
Position recording (S2–S3) | As the SoftJoint makes it possible to be pushed for an external force, the teaching point should be placed inside the workpiece to secure the effect of applying a force onto the workpiece |
Axis.Softness | § Set the softness by taking in consideration the direction of working, the material of the workpiece, and the level of machining. § In the example shown above, as the robot will be pushed in the +X direction based on the robot coordinate system while moving in the –Y direction, it is needed to set the softness for the R2 and B axes |