4.2. Automatic operation
4.2. Automatic operation
1) When the conditions of automatic operation are met, 1-cycle operation will be executed.

§ In automatic operation, the playback speed ratio in “[F7]: Condition Setting” will not apply. Note that the robot will only move at the speed of the recorded step.
§ In the painting section, the Atom/Spray outputs will be switched off when the robot stops, and on when the robot restarts. In this case, signal on/off will comply with the sequence timing. See Section 3.4 Output assignment signal.
§ Note that the paint may not be sprayed normally at the stop point due to time delay when the robot stops and restarts in the painting section.
§ Note that the paint spraying may start at an incorrect position when the robot stops and restarts just before the painting section.
§ When the robot is stopped and the step is changed in the painting section, the painting section state will be cleared, the PAINT command state will be off, and the Atom/Spray output signals for paint supply will not switch on again.
§ When the PAINT OFF command is given before the END command in the program as shown in Figure 4.1, paint quality may be degraded as the robot moves to Step 1 immediately before the output signal is switched off to match the sequence. In this case, set delay between the END command and Step 1. See Section 4.1 Conditions of automatic operation.
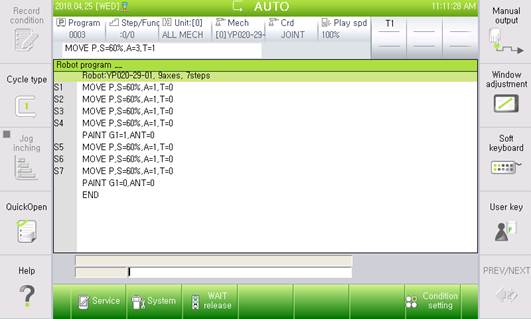
Figure4.1 Executing the PAINT command before shutting off the program
§ Pay attention in setting step positions and sequence data as specified sequence may become invalid if the moving distance of the PAINT command on/off section of the GUN is too short.