5.4. Workpiece Coordinate
5.4. Workpiece Coordinate
The workpiece pose value transferred from the Pick-it equipment to the robot will be set in the direction in which the positive Z-axis penetrates the ground vertically, or is vertical to the surface of the workpiece and penetrates the ground, as shown in Figure 5–1. If this posture value is used as it is, problems could occur because it will be impossible to match with the direction of the robot tool coordinate. The robot tool is generally set in the positive z-axis direction facing from the flange toward the outside of the robot arm, as shown in Figure 5-2. If the workpiece posture sent from the Pick-it equipment is used as it is, the tool will be facing toward the robot, causing an error.
To solve this problem, the robot of Hyundai Robotics rotates the workpiece posture internally, sent from the Pick-it equipment by 180°, randomly based on the x-axis as shown in Figure 5-3, and then stores the posture in the pose variable. This allows the tool to take a posture to pick a workpiece. The precaution to take is that the workpiece posture seen through the Pick-it screen is different from the workpiece posture that is used as a pose variable in the robot.
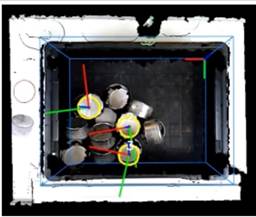
Figure 5-1 Z-axis direction of the workpiece processed by the Pick-it equipment
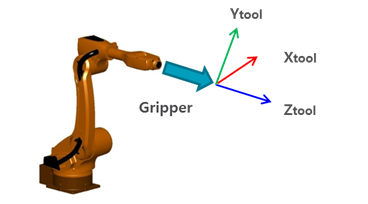
Figure 5-2 Z-axis direction of the tool coordinate
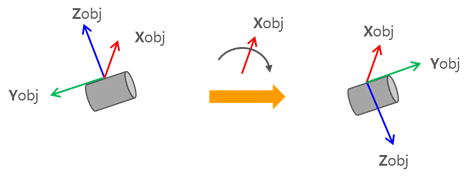
Figure 5-3 Converting and storing a workpiece posture