3.1. BD525 DeviceNet Slave Setting
3.1. BD525 DeviceNet Slave Setting
To use a slave of the BD525 DeviceNet, it is required to set the bus parameter of the robot controller.
(1) Execute "[F2]: System" →"2: Control parameter" → "2: Input and output signals setting" → "15: BD525 fieldbus setting and diagnosis."
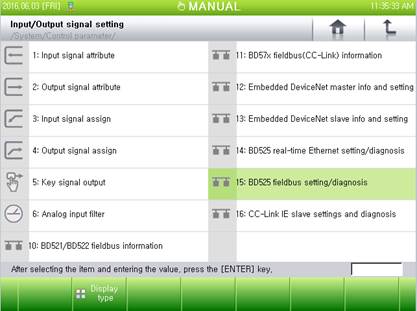
Figure 3.1 Menu of the BD525 fieldbus setting and diagnosis
(2) Channel #3 is for the DeviceNet slaves.
Input "3" in the channel input box, and press "Enter" or use the "[F3]: Previous" or "[F4]: Next" button to move to channel #3.
(3) Set the information, such as the use, station number, input following a communication error, I/O size, and communication speed, and press "[F6]: Apply" or "[F7]: Complete."
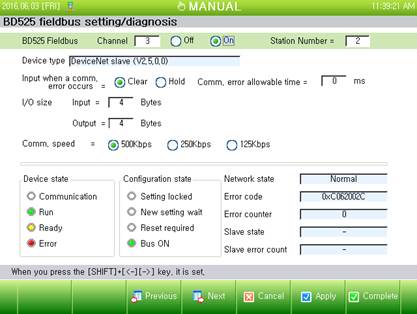
Figure 3.2 Screen for setting the BD525 DeviceNet slaves.
l Use
∙ Set it as "On" to use the communication with a DeviceNet slave.
l Input following a communication error
∙ This is an option for handling the input data (FB3.X) when there is a communication error. When it is set as "Clear," all the data will be cleared to 0 when a communication error occurs. If it is set as "Hold," the last effective value will be maintained when a communication error occurs.
l Station number
∙ The effective range of the DeviceNet MAC ID is 0–63.
l Time allowed for a communication error
∙ Within the set time, a communication error will not generate an error/warning message. (0~65535 ms)
l I/O size
∙ Input: Set the size of the input data (FB3.Y) by taking the master as reference (0–120).
∙ Output: Set the size of the output data (FB3.X) by taking the master as reference (0–120).
l Communication speed
∙ Set the speed to match the communication speed of the master.
| Once the setting is changed, you should click the "[F6]: Apply" or "[F7]: Complete" button to reflect/save the change into the controller. In addition, if the setting is changed while the use is set as "On," the changed condition will be reflected after the device is reset or the controller is rebooted. |
