6.1. Overview of the HiNet I/O
6.1. Overview of the HiNet I/O
The HiNet I/O enables I/O sharing by using a network dedicated to the cowork control. Each controller monitors the signal between cooperation robots and allocates the shared signals to I/O so that they can be freely flow. The output size that can be used by each controller is 4 bytes, and each controller can receive 124 bytes in addition to the output size. Unlike the cowork control, the HiNet I/O enables the transmission and reception of signals for a maximum of 12 robots belonging to different groups that are connected to the HiNet network.
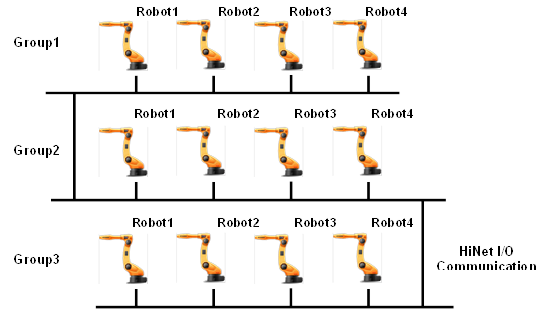
Figure 6.1 Structure of HiNet groups
Because this function can not only be used to detect the I/O signal by using the robot language (HR-BASIC) but also be used as a parameter, there are various applied methods to meet the various needs of the user.
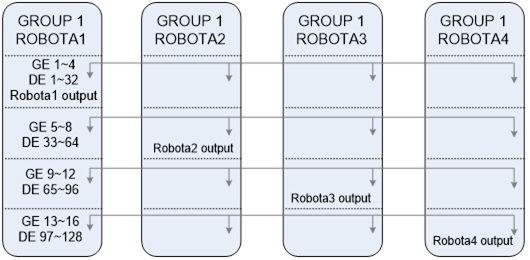
Figure6.2 Example of the use of the HiNet I/O (Group 1 – Four robots)
The DE is a signal in the bit unit. The GE is a bundle of eight DE signals in the byte unit. Therefore, signals can be inputted/outputted in the 0–255 range.
The range of the GE signal output of the individual robot controllers belonging to a cowork control group number is as follows:
l Min. GE = { (G#-1)X4 + (R#-1) }X4 + 1
l Max. GE = { (G#-1)X4 + (R#-1) }X4 + 4
Table 6‑1 I/O Zone by robot number
GE [byte] | G1 R1 | G1 R2 | G1 R3 | G1 R4 | G2 R1 | G2 R2 | G2 R3 | G2 R4 | ... |
1~4 | Out | In | In | In | In | In | In | In | … |
5~8 | In | Out | In | In | In | In | In | In | … |
9~12 | In | In | Out | In | In | In | In | In | … |
13~16 | In | In | In | Out | In | In | In | In | … |
17~20 | In | In | In | In | Out | In | In | In | … |
21~24 | In | In | In | In | In | Out | In | In | … |
25~28 | In | In | In | In | In | In | Out | In | … |
29~32 | In | In | In | In | In | In | In | Out | … |
… | … | … | … | … | ... | … | … | … | … |