1.2.1. Major function specification
1.2.1. Major function specification
Table 1‑1 Specifications of the cowork control
Major function specification | Remarks |
Number of cooperation robots | Maximum four units within a group |
Communication method | Exclusive for Ethernet (HiNet™) |
Communication speed | 100MBPS |
Possible number of master robot | 1 robot |
Possible number of slave robot | 3 controllable slave under 1 master |
Main axis | Main axis cooperation is possible |
HiNet I/O | 32 output point per robot |
Jigless cooperation | Robot and positioner jigless cooperation support |
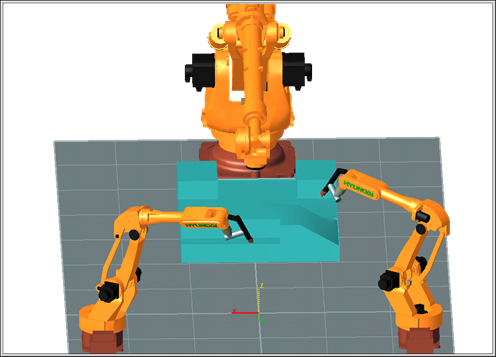
Figure1.2 Jigless Cooperation