2.1.1. Setting Enable/Disable of the Function and Communication Systems
2.1.1. Setting Enable/Disable of the Function and Communication Systems
Determine the Enable/Disable of whether to use the function of preventing the cube interference.
Select the menus as follows: 『[F2]: System』 → 『4: Application Parameter』 → 『7: Interference prevention』 → 『1: Cube interference prevention』 → 『1: Cube condition setting』, then determine whether to use the function and the communication systems.
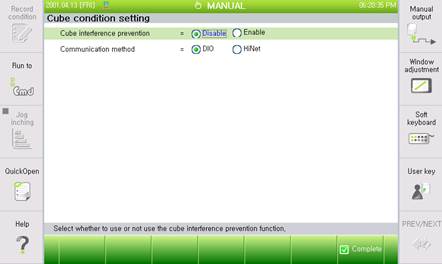
1) Cube interference prevention <Enable, Disable>: select whether the function is Enable or Disable.
Set up the cube area and select ‘Enable’ so as to use the function of preventing cube interference.
When ‘Disable’ is selected, the interference area may not be set up and the I/O signals are not sent.
2) Communication method <DIO, HiNet>: select the communication for I/O signals of cube interference detection.
When DIO is selected, the universal I/O signals shall be chosen; when Hinet is selected, the cooperative control network shall be connected.
When it comes to the cooperation control network, select 『[F2]: System』 → 『2: Control Parameters』 → 『9: Network』→ 『3: Service』→ 『1: Cooperation Control』 to set the cooperation control as enable as shown below, and then set the group number and the robot number. Take precautions to ensure that there are no overlapping robot numbers within the same group. When it comes to the HiNet network status, select 『[F1]: Service』 → 『1: Monitoring』 → 『10: Cooperation Control Data』→『2: HiNet I/O』 → 『[F5]: Overall Configuration』 to check the status through the HiNet-IO connection status window. In this process, the robots marked in green are the ones participating in the cooperative control network