1.2. System Configuration
1.2. System Configuration
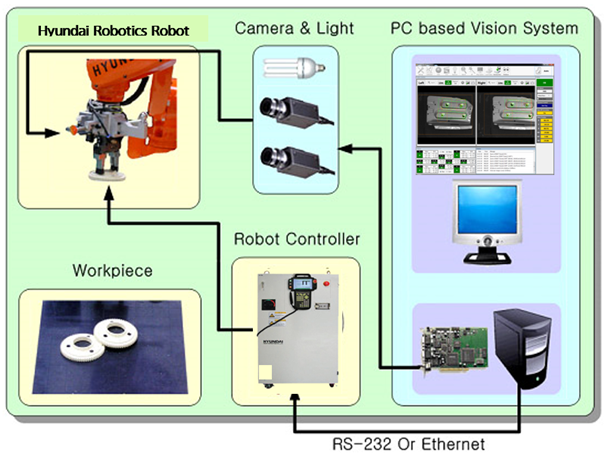
The following figure shows a schematic diagram of a handling robot vision system that uses the HRVision 3D-Stereo. The entire system consists of the robot system and the vision system. The vision system consists of hardware, including a PC, a frame grabber, a camera, an illumination unit, and a PLC, and the HRVision 3D-Stereo software.
The user can set and operate the vision system through the HRVision 3D-Stereo program, as well as communicate with the Hyundai Robotics robot through the Hyundai Robotics-specific communication protocol. The Hyundai Robotics robot handles the workpiece according to the position recognition result of its vision system.
A frame grabber will be unnecessary when using a digital camera.