7.2.5. Registration of home position
7.2.5. Registration of home position
This is the function to output the original location signal, set in the output signal section, if the user registered an arbitrary posture of the robot as its original location and the robot came into that location. The original location is designated by each axis posture and here the margin by each axis can be set.
Up to 8 original locations can be registered and used.
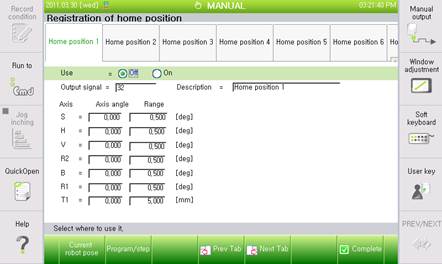
l Axis angle, range
Enter the range of position for each axis of the robot at the home position. When the range value is set to 0, the home position check will not be carried out for the relevant axis.
The range value is used in the ‘+’ direction and ‘-‘ direction ranges of the original location point. For example, when it is set to 0.5, the output range of the original location signal becomes 1.
l [F1: Current robot pose]
This function is to allow the axis angle of the current posture of the robot to be entered into the screen automatically.
l [F2: Program/Step]
This function is to allow the axis angle of the relevant step to be entered into the screen automatically after the program and step number are entered by the user