3.2. Example of Connection/Disconnection of Positioners
3.2. Example of Connection/Disconnection of Positioners
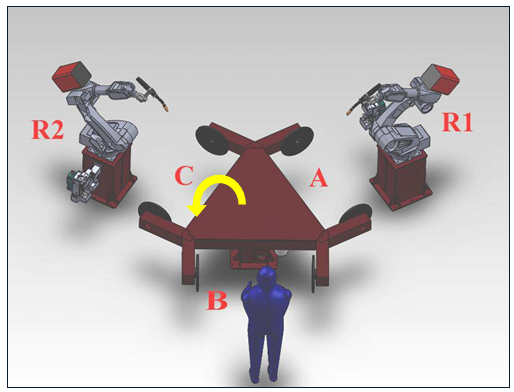
Figure 3.1 2 Robots and 3 Positioners
(1) Components of the positioner change system
- System components: 2 robots + 3 positioners
- Necessary equipment: ATC (Auto Tool Changer) for connecting individual positioners and
robots. A Servo gun changer for the company’s robot.
(2) Work content
- The robot #1 is connected with the positioner A and then carries out work. The robot #2 carries out work with the positioner C. The operator needs to mount the work object to the positioner B.
- When the work at each positioner is completed, the connection between the robot and the positioners need to ended.
- When work at #3 is completed, the overall positioner system will rotate 120 degrees counterclockwise.
- The robot #1 is connected with the positioner B and carries out work. The robot #2 carries out work with the positioner A. The operator mounts the work object to the positioner C.
- The work needs to be repeated afterwards.
(3) Caution
- It is recommended to separate/connect each positioner at the same position if possible.