3.1. Special Note
3.1. Special Note
(1) The most sensitive reaction direction to the external force is the right and left directions (±Y) of the robot’s coordinate system. It recommended to install a robot in a way that makes the robot tool slide in the +Y or –Y direction.
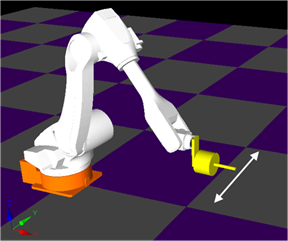
Figure 3.1 Recommendable Direction of ServoFree
(2) If the user activates the ServoFree function right after the robot has moved to a specified step, an error of estimate of the external force may be high. It is recommended to input 2-second lag time (DELAY 2.0) before activating the ServoFree function.
(3) The maximum sliding rate shall be bigger than or the same as the rate at which the robot is pushed. If the input maximum sliding rate is smaller than the rate pushing the robot, it results in an excessive external force to the robot, so it may get damaged. The possible setup of maximum sliding rate is 300mm/s.
(4) If the user pushes the robot tool that has been already pushed to the extent of the maximum sliding distance, it results in an excessive external force to the robot, so its tool may get damaged. Therefore, the user shall establish the maximum sliding distance higher than the real sliding distance. The possible setup of maximum sliding distance is 1,000mm.
(5) The robot tool may not stop and continues to slide even after the external force is zero (0) due to several effects such as a tool weight, and in this case, there is a potential collision between the robot tool and ambient equipment. Appropriate setup of the maximum sliding distance make it possible that the robot tool may stop within a certain distance even though it continues to slide without the external force.
(6) With respect to load information of tool numbers used in ServoFree teaching program, information including a gripper and work pieces which the gripper handles shall be input. If it is difficult to manually input the precise load information, using the ‘Load Estimation’ function comes recommended.