1. Introduction
Positioner synchronization function is the function that enables the robot to trace the operation of jig installed externally or to operate linear or arc form relative to the jig operation. External jig device applied to the positioned synchronization function is called the positioner, which is also called the station.
Challenging task from the limitation of the work area of the robot can be supplemented by using this function. That is, if the workpiece is fixed on the positioner and the positioner moves, the robot is designed to follow the movement of the positioner to execute linear or arc operation on the workpiece.
Specifications of key functions are as follows.
Key functional specification | Characteristic |
Positioner group | Support 1~4 groups |
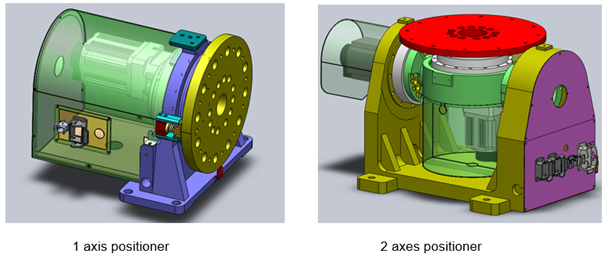
Number of positioner axis | Support positioner of 1 axis and 2 axes (Rotating axis) |
Interpolation method | Supports linear and arc interpolation |
External input independent jog (SELSTN) | Positioner selected from auto mode supports jog operation function irrelevant from the robot |
External input independent playback (AXISCTRL) | Positioner selected from auto mode supports independent playback (MOVE) function irrelevant from the robot |