2.3.2. Communication Methods
2.3.2. Communication Methods
A PC serves as a server and a robot controller serves as a client with the use of the UDP/IP communications and the communication cycle of 5 msec. The controller’s main board provides 3 network ports (EN0, EN1, and EN2) but shall communicate with the EN2-set IP address and the port No. 6001 on the PC. (Refer to the network of the ‘Hi5 Controller Instruction Manual with respect to the settings of the EN2 IP address.) The PC’s IP address and the port number shall be the same as the values set by the OnLTrack ON command, and the PC and the controller shall be connected through the cross Ethernet cable. The Command variables shall be transmitted and received in accordance with the communication order for the communications between the PC and the controller. Figure 3.1 shows the communication order between the PC and the controller and the Command variables that are transmitted and received.
① The PC initializes the UDP/IP communications and stands by for connection. ② When the controller runs the OnLTrack ON command, it transmits the data to the PC so as to notify the start (Command='S'). ③ After the PC receives the notification, it transmits the data of connection check to the controller (Command='S'). ④ The PC transmits the incremental command of the calculated position to the controller (Command='P'). ⑤ The controller receives and applies the incremental command, then transmits the robot’s current position (Command='P'). ⑥ After repeating above ④ and ⑤, the controller transmits the data to the PC to notify the end of the function during the operation of the OnLTrack OFF command (Command='F'). |
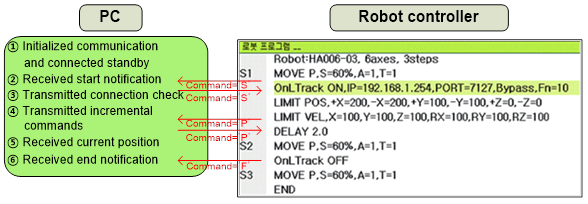
Figure 2.2Communication Order between PC and Robot controller
A PC shall serve as a server and a robot controller as a client through the UDP/IP communications. When the robot program operates as seen in Figure 3.1, the robot controller, as a client automatically starts and terminates the communications with the server PC in accordance with the OnLTrack ON and OFF commands, which enable the online tracking to function. Furthermore, the communication cycle between the PC and the controller is 5 msec. If 2 and more data are received within 5 msec, the latest received data apply and the previous data are ignored; therefore, be careful when transmitting data from the PC, please.