1.2. Formation of the Hi5OLP Package
1.2. Formation of the Hi5OLP Package
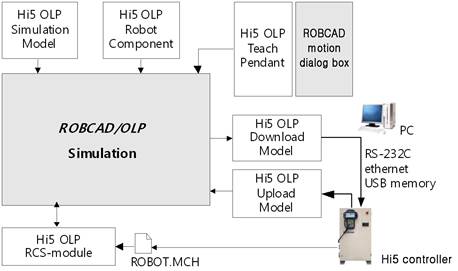
Figure 1.2 Formation of the Hi5 OLP package
The Hi5 OLP package is composed of various components, as shown in [Figure 1.2]. The role of each component is described in [Table 1-2] below.
Table 1‑2 Components of the Hi5 OLP package
Component | Role |
Teach Pendant | Input and edit step parameters and function commands for each location |
Simulation Model | Define and execute the steps and functions of the Hi5 controller, and simulate robot motion through the same method at the time of simulating robot work |
Download Model | Convert robot work that has passed through the simulation, correction and confirmation process into a work program for the Hi5 controller |
Upload Model | Convert a work program existing on the Hi5 controller into a path inside of a ROBCAD work cell |
Robot Component | Call CAD data of a defined shape and the Kinematic data of a robot to inside of the work cell of ROBCAD, and use it for creating and simulating work |
RCS-module | Calculate robot trace when motion operation of the Hi5 controller is simulated |