2.3.2. Interrupt number (_INT.TARGET)
2.3.2. Interrupt number (_INT.TARGET)
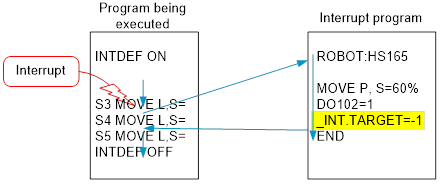
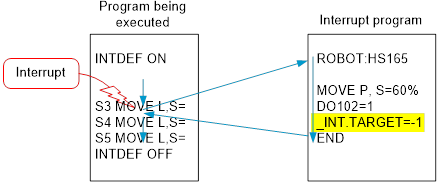
Description | Manages the state of reaching the target position. For example, while the robot is moving, if the interrupt condition is met, after the execution of the called program has ended, it needs to be moved back to the position of the program that was being executed. In this case, the position can be adjusted and used. |
Grammar | _INT.TARGET=1 (-1, 0, 1) |
Example | _INT.TARGET=-1 “Not reaching the target position” _INT.TARGET=0 “Matching the target position” _INT.TARGET=1 “Exceeding the target position” |
Example) _INT.TARGET=-1

Example) _INT.TARGET=1 or 0