6. Hinet I/O Function
This function shares the I/O through the HiNet connected to the collaborative network. Each controller monitors the signal between cooperation robots and allocates the shared signals to I/O so that they can be freely flow. The output size each controller can use is 4 bytes.
Because this function can not only be used to detect the I/O signal by using the robot language (HR-BASIC) but also be used as a parameter, there are various applied methods to meet the various needs of the user.
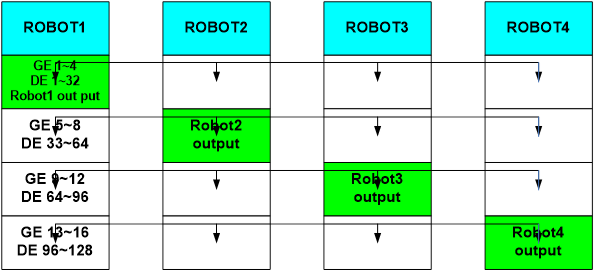
Figure 6.1 HiNet I/O
Table 6‑1 I/O Zone by robot number
Robot no. | GE (OUT) | GE (IN) | DE (OUT) | DE (IN) |
Output allocated zone | Input allocated zone | Output allocated zone | Input allocated zone | |
Robot 1 | 1~4 | 5~16 | 1~32 | 33~128 |
Robot 2 | 5~8 | 1~4, 9~16 | 33~64 | 1~32, 65~128 |
Robot 3 | 9~12 | 1~9, 13~16 | 65~96 | 1~64, 97~128 |
Robot 4 | 13~16 | 1~12 | 97~128 | 1~96 |