1.1. Introduction of robot cooperation function
1.1. Introduction of robot cooperation function
Robot cooperation function is the function to execute an operation using several robots to complete an operation that would not be possible with one robot.
This function can be applied to the following cases.
n When handling the work object through a cooperation of two robots with a simple hand.
n When handling work object of which the volume exceeds the possible range one robot can handle
n When the master robot is handling the work object and at the same time the slave robot is executing a jigless operation such as arc welding or sealing.
You can synchronize the cooperation work among a maximum of 4 robots.
Each robot can execute an independent operation and a cooperation operation from one program.
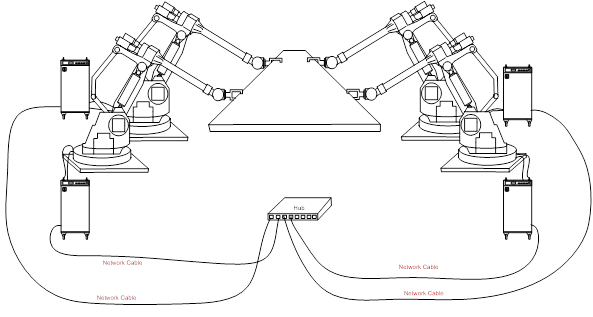
Figure 1.1 Robot cooperation function