1.2. Logic of conveyor synchronization
1.2. Logic of conveyor synchronization
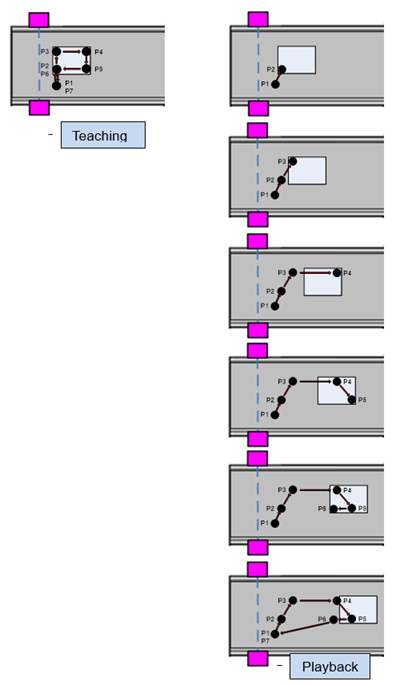
When playback the trace P1~P7 (P2~P6 is for conveyor synchronization) taught when the conveyor is in stopped condition as shown in the following picture, the movement of the workpiece is calculated from the limit switch for the workpiece installed on the conveyor and then added to the reference location for playback. For this, the robot must be synchronized to the changing conveyor speed to maintain the relative location and position between the workpiece and the tool.